Cette technique s'est développée à partir des années 1990 avec l'imagerie numérique si on ne tient pas compte des précurseurs comme M.Locquin avec ses "photosynthèses" ( manuel de microscopie de 1978) ou J.Delly avec des collages de parties de tirages (livre photomacrography chez Kodak vers 1970) ou encore des techniques de "balayage" en argentique, utilisées par exemple par le système Dynaphot, ou par Sébastien Woehl.
D'après un historique de Rik Littlefield , les premières publications universitaires concernant des images numériques zedifiées remontent aux années 1980 (ex: Adelson&Al. 1984) et les premiers logiciels commerciaux aux années 1990.
Pour ma part, c'est une communication de H.G.Adelmann aux 7e journées de microscopie de Hagen en novembre 1998 qui me l'a fait découvrir en microscopie (déja avec un moteur pas à pas commandé en visual basic); mais l'idée de passer de la microscopie à la forte macro était déja présente! (article dans Wissenschaftliche Mitteilungen XI,5 pages 149-156, octobre 1997: "Eine Schrittmotor-Steuerung...für 3D-Rekonstruktionen")
Toutefois, il y avait un obstacle car les logiciels nécessaires étaient soit d'usage complexe pour scientifiques comme ImageJ ou soit des compléments couteux à photoshop.
La sortie de logiciels grand public dans les années 2000 (combineZ sous windows dès 2002, HeliconFocus en 2004 également, puis Zerene stacker en 2009 pour les appareils Mac intosh en plus) a permis le développement de la zedification parmi les photographes naturalistes amateurs ou professionnels dont plusieurs montrent des images d'insectes ou de plantes irréalisables auparavant (Linden Gledhill, John Hallmen, Nikola Rhamé, Nicolas Reussens, Gilles San Martin, Javier Torrent et Javier Replinger, Frédéric Labaune...).
Ceci au travers d'échanges, en particulier sur le forum photomacrography.net ou sur des groupes flickr comme "extreme macro gear" ou "focus stacks" .
autres groupes pour images : "DOF-stacking" ou encore "insects-field-stacks" ou "insects-studio-stacks".
Les photographes intéressés ont d'abord du assembler des bancs macro permettant des déplacements fins entre chaque image de la pile. Des platines de microscopie ont été utilisées, avec des boutons à tourner plusieurs dizaines de fois d'un petit angle...
Dans ce contexte, il était normal d'imaginer des systèmes de robots automatisant la réalisation de dizaines d'images étagées.
La firme Cognysis a mis en vente (en début 2010 ) un appareil permettant cette automatisation: le stackshot
| Des systèmes complets permettant la photographie sur ce principe ont été présentés sur internet: | Micro | "super macro" | Macro |
| par Linden Gledhill: | BH2 Olympus et stackshot |
stackshot et MPE65mm Canon |
|
| par Enrico Savazzi | Mitutoyo FS60 motorisé |
En décembre 2012, le canadien Rylee Isitt a donné sur le forum photomacrography le lien pour la page de son site ou il décrit un système à base d'Arduino.
Auparavant, l'idée de réaliser un système similaire a germé sur le forum: "le naturaliste" courant 2011.
Des échanges ont permis de définir des besoins et le matériel nécessaire déja autour d'une carte Arduino.
Christian Aubert avait déja en 2007 réalisé un robot sur base picbasic dédié à un travail simillaire sur statif de microscope
Il a dirigé le travail et a créé et réalisé à la fois un prototype et la programmation correspondante.
Il a mème conçu une carte fille pour Arduino pour les montages définitifs soignés.
Frédéric Labaune a proposé le nom de Stepduino pour le système (car basé sur un moteur pas à pas stepping motor).
Plusieurs membres se sont lancés dans la réalisation de leur prototype ainsi que de leur système basé sur leur propre matériel photographique et leur banc de mise au point.
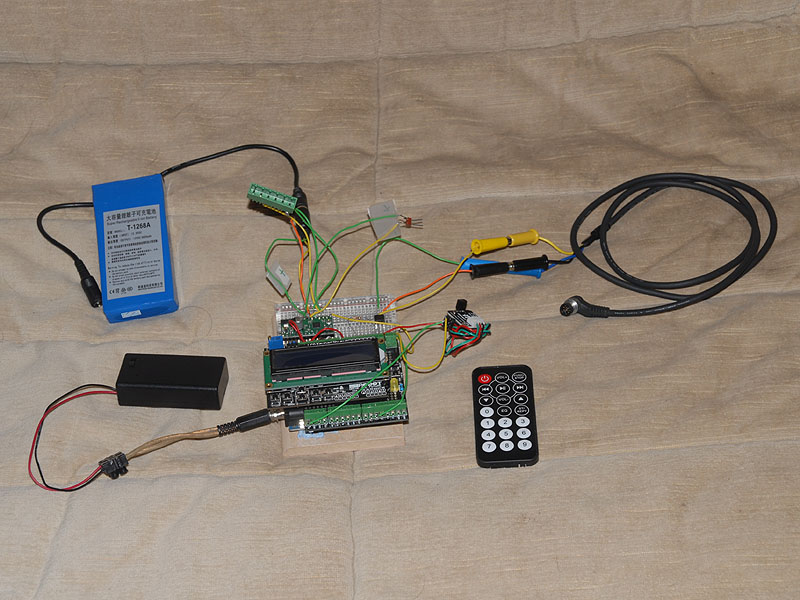
| Je n'ai fait que suivre
les indications de montage et adapter le fonctionnement à
mes dispositifs photographiques. Voici l'état de mon bricolage au début de l'été 2012 C'est un prototype fonctionnel, mais non soudé et sans boitier... Les principaux composants sont: - Arduino uno - carte de puissance pollulu A4988 - écran 3 lignes DFRobot - batterie rechargeable 6800mAh lithium-ion Rechargeable 12V (pour moteur) - batterie rechargeable type bouton 9V (pour arduino) - cable de déclenchement pour appareil photo - télécommande infrarouge |
 |
Une prise permet de se connecter à des moteurs bipolaires 4 fils que je possèdais déja.
J'ai prévu 4 systèmes d'avance plus ou moins importante pour différents situations photographiques avec des grandissements plus ou moins élevés et des pas plus ou moins fins:
| Micro | Microterrain | Macro | Proxi | |
 |
 |
 |
 |
|
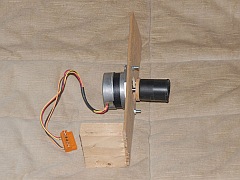
| entrainement du bouton micromètrique du microscope (en fait ce système me servait déja avec une carte stepeasy sur sortie paralèle d'un ordinateur) | bloc de mise au point de
BHM à bouton relié à un moteur par une
courroie. (occasion Ebay sur laquelle je n'ai eu qu'a fixer mon moteur avec une équerre) |
platine
micromètrique manuelle (portant un charriot de map pour le dégrossissage) |
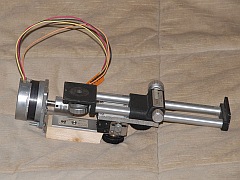
Charriot Del Tron (occasion) |
|
| course possible | celle du microscope | 30mm | 10mm | environs 35mm |
| profondeur au tour | Le bouton d'un BHM
correspond à: 200 microns= 0,2mm |
Réduction des tours du BHM par courroie crantée 19->67 | 0,5mm | A peu près
35/14= 2,4mm annoncé 1/10e de pouce = 0,254cm |
| profondeur par pas (1/200e tour ): | 1µ | 0,283µ | 2,5 microns | dans les 12,5 microns |
| Optiques et grandissements associés: | ceux du microscope composé: 5x à 250x (500x avec projectif 5x) |
diverses optiques RMS: - Luminars: environs 2 à 10x - Nikon U: 5, 10 et 20x - Olympus MSplan: 5 à 50x ou 26mm (Mitutoyo) |
180mm+Msplan 2,5x à 20x 200mm+ Mitutoyo 2à 10x ... |
soufflet et 105 ou 65mm Nikon 0,5x à 5x mais aussi 180mm+Msplan 2,5x à 20x ... |
| remarques: | système labo et diascopie | usage possible sur le terrain avec un sujet immobile |
Bien que permettant un pas plus fin que le suivant, ce système a été laissé de coté du fait de mouvements parasites avec la transmission du moteur à la platine. | montage le plus robuste, sur rail de type de celui du stackshot. |
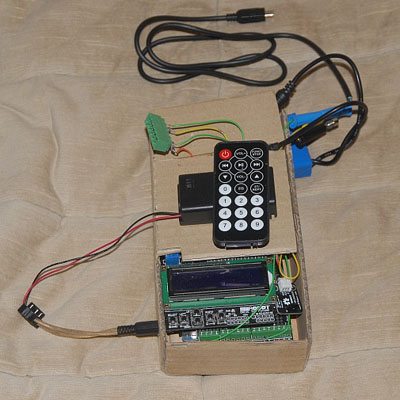 |
Pour les premiers essais en extérieur, voici le montage dans un boitier provisoire en carton et raccordé aux systèmes MicroTerrain et proxi. |  |
 |
J'ai vite
constaté qu'en
extérieur le problème de la stabilité
du sujet est
quasi insoluble en macro. Le sujet se déplace toujours
mème avec un vent insensible. Je pense peu sortir le
modèle Micro terrain. Il faut se limiter à des
images
proxi.
Le flash TTL sans fil fonctionne en extérieur, mais pour les boitiers qui en sont dépourvus, les cellules de synchro ne sont pas assez efficaces et il faut revenir à un cable de synchro (ou il faudrait tester un système radio).
Daniel Nardin juillet 2012Le flash TTL sans fil fonctionne en extérieur, mais pour les boitiers qui en sont dépourvus, les cellules de synchro ne sont pas assez efficaces et il faut revenir à un cable de synchro (ou il faudrait tester un système radio).
Ajout adresse projet Rylee Isitt décembre 2012
complément historique, juillet 2013